Priority Inheritance with Backtracking
for Iterative Multi-agent Path Finding
Keisuke Okumura, Manao Machida, Xavier Défago, and Yasumasa Tamura
[code] [robot implementation (toio)]
Important note: This page is for a journal paper (AIJ). We substantially updated from the original repo of the conference paper (IJCAI-19). Much faster.
Multi-agent Path Finding
Multi-agent Pickup and Delivery
Robot Demo
Overview
In the Multi-Agent Path Finding (MAPF) problem, a set of agents moving on a graph must reach their own respective destinations without inter-agent collisions. In practical MAPF applications such as navigation in automated warehouses, where occasionally there are hundreds or more agents, MAPF must be solved iteratively online on a lifelong basis. Such scenarios rule out simple adaptations of offline compute-intensive optimal approaches; therefore, scalable sub-optimal algorithms are appealing for such settings. Ideal scalable algorithms are applicable to iterative scenarios and output plausible solutions in predictable computation time.
For the aforementioned purpose, in this study, a novel algorithm named Priority Inheritance with Backtracking (PIBT) is presented to solve MAPF iteratively. PIBT relies on an adaptive prioritization scheme to focus on the adjacent movements of multiple agents; hence it can be applied to several domains. We prove that, regardless of their number, all agents are guaranteed to reach their destination within a finite time when the environment is a graph such that all pairs of adjacent nodes belong to a simple cycle (e.g., biconnected). Experimental results covering various scenarios, including real robots demonstration, reveal the benefits of the proposed method. Even with hundreds of agents, PIBT yields acceptable solutions immediately and can solve large instances that other de facto MAPF approaches cannot. In addition, PIBT outperforms an existing approach on an iterative scenario of conveying packages in an automated warehouse in both runtime and solution quality.
News
- PIBT seemed to be used as a core of the winning strategy in the first MAPF competition (2023), among 825 submissions. Congrats!
- The paper has been accepted to Artificial Intelligence (AIJ)! (Jun. 2022)
Errata
- In the introduction it is written that "Δ(G) is a diameter of a graph G", but it is the maximum degree of the graph.
Video
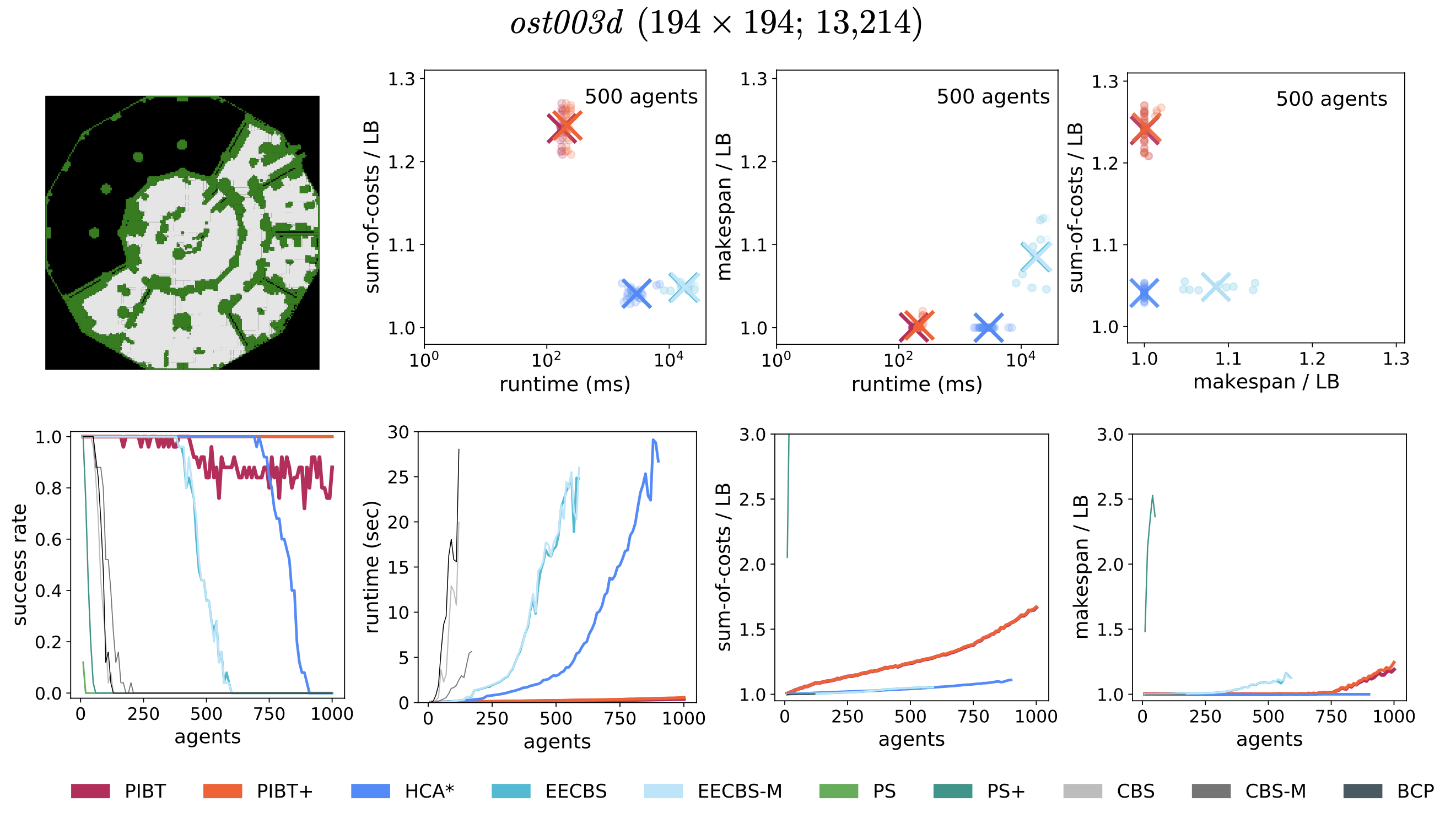
Emprical Results with MAPF Benchmarks
Check the paper for details. PIBT(+) is much more scalable than other established algorithms.
Slides (IJCAI-19)
Note: The algorithm description/concept is the same, but empirical results are much improved in the journal. In addition, the slides are out of date given the current advances in the field. I recommend to check my latest slides such as the CMU lecture talk (2024).
Citation
@article{okumura2022priority,
title = {Priority Inheritance with Backtracking for Iterative Multi-agent Path Finding},
journal = {Artificial Intelligence},
pages = {103752},
year = {2022},
issn = {0004-3702},
doi = {https://doi.org/10.1016/j.artint.2022.103752},
author = {Keisuke Okumura and Manao Machida and Xavier Défago and Yasumasa Tamura},
}Contact
okumura.k [at] coord.c.titech.ac.jp